Momentum
Momentum is an important concept in physics that is very useful for studying the motion of objects involved in collisions. When an object is in motion, we say that it has momentum. Momentum in physics has much the same meaning as in everyday life. On this page, you will learn about the following: the definition of momentum, isolated systems, the law of conservation of momentum, impulse, types of collisions, 1-D and 2-D collisions, and the center of mass.Linear momentum or momentum
Momentum, $\vec p$ of an object is defined as$\vec p=m\vec v$
where $m$ is the mass of the object, and $\vec v$ is its velocity.
Since velocity is a vector, momentum is also a vector. The direction of the momentum is the direction of the object's velocity. The momentum $\vec p$ is also called linear momentum or translational momentum.If the velocity of an object is zero, then it has no momentum.
Unit of momentum: To find the unit of momentum, we multiply the unit of mass by the unit of velocity. The SI unit of momentum is $kg.m/s$, or $N.s$.
Force and momentum
To change the momentum of an object, we need to change its velocity, and to change its velocity, a force must be applied to it. So, to change the momentum of an object, a force must be applied to it. We can derive an equation relating force and the change in momentum by using Newton's second law.Assume an object is moving with some initial velocity $\vec v_1$. Now let us apply a net force $\vec F$ to the object for a time period $\Delta t$. The force changes the velocity of the object; let the new velocity be $\vec v_2$.
Writing Newton's second law,
$\vec F=m\vec a$
$=m\dfrac{\Delta \vec v}{\Delta t}$
$=m\dfrac{\vec v_2-\vec v_1}{\Delta t}$
$=\dfrac{m\vec v_2-m\vec v_1}{\Delta t}$
$=\dfrac{\vec p_2-\vec p_1}{\Delta t}$
where $\vec p_1=m \vec v_1$ and $\vec p_2 = m \vec v_2$ are the initial and final momenta of the object. The initial momentum is the momentum of the object before the force is applied, and the final momentum is the momentum just after the force is applied.
Since $\vec p_2-\vec p_1=\Delta \vec p$, the change in momentum of the object, we get
$\vec F=\dfrac{\Delta \vec p}{\Delta t}$
That is, the force applied to an object is just the change in the object's momentum divided by the time the force acts. In other words, the force on an object equals the rate of change of its momentum. This equation is actually the original form of the second law as formulated by Newton, but today we usually use the $\vec F = m\vec a$ form.
The law of conservation of momentum
Isolated system
A system is a group of two or more objects. If the net external force acting on a system is zero, we call it an isolated system. So no external force affects an isolated system. The objects of an isolated system can collide with one another, and during a collision, one object exerts a force on another. So an object in an isolated system can experience a force from another object within the system, but not from outside the system.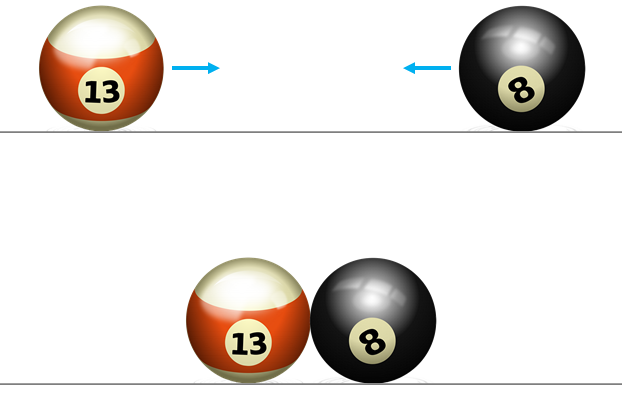
In the figure above, two billiard balls move toward each other and collide. We can consider the two balls as a system. During the collision, the red ball exerts a force on the black ball and the black ball exerts a force on the red ball. These are internal forces of the system, since both balls are part of the system. Is there any external force on the system? Consider the forces acting on each ball: a force of gravity acting downward and a normal force from the surface acting vertically upward. These two forces balance, so there is no net external force in the vertical direction. In the horizontal direction, however, a force of friction acts on the balls, so there is a net horizontal force on each ball. Thus, because of friction, the net external force on the system is not zero. If the surface were smooth and frictionless, the system would be an isolated system.
Law of conservation of momentum
We can show that the total momentum of an isolated system is conserved. That is, if the objects of an isolated system collide, the total momentum of the system before the collision is equal to the total momentum after the collision. This is called the law of conservation of momentum. The total momentum of the system is the sum of the momenta of its objects.The figure below shows an isolated system of two objects, object 1 and object 2. The objects are in motion and collide. Let $\vec p_1$ and $\vec p_2$ be the momenta of object 1 and object 2 before the collision, and $\vec p_1'$ and $\vec p_2'$ their momenta after the collision.
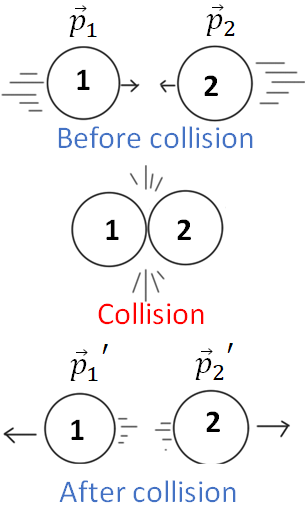
The total momentum of the system before the collision is $\vec p_1+\vec p_2$, and the total momentum after the collision is $\vec p_1'+\vec p_2'$. According to the law of conservation of momentum, the total momentum before the collision equals the total momentum after the collision. Therefore,
$\vec p_1+\vec p_2=\vec p_1'+\vec p_2'$.
The proof of the law of conservation of momentum is given in a separate page: the law of conservation of momentum.
Note that momentum is conserved only in an isolated system, in which there is no net external force acting on the objects. In real-world collision problems, friction is the external force that acts on objects moving on surfaces. But friction takes some time to affect the motion of the objects. So, if we consider the motion immediately before and immediately after the collision, we can ignore friction and treat the system as an isolated system, and the law of conservation of momentum holds.
One dimensional collision
In a one-dimensional (1-D) collision, the objects involved in the collision move along a straight-line path both before and after the collision.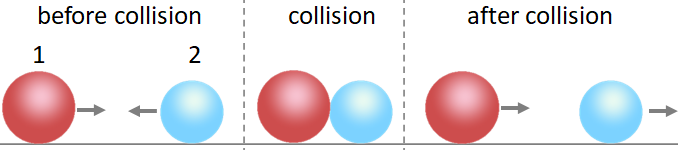
The figure above shows a collision of two objects, object 1 and object 2. This is a 1-D collision because, before and after the collision, the objects move along the same straight line. Since the objects are in 1-D motion, we drop the vector symbol from the momenta; we just need to be careful about the signs.
If $m_1$ and $m_2$ are the masses of objects 1 and 2; $v_1$ and $v_2$ are their velocities before the collision; and $v_1'$ and $v_2'$ are their velocities after the collision, then
the total momentum of the system before the collision is $=m_1v_1+m_2v_2$
and
the total momentum after the collision $=m_1v_1'+m_2v_2'$.
The above two momenta are equal according to the law of conservation of momentum, therefore
$\boxed{m_1v_1+m_2v_2=m_1v_1'+m_2v_2'}$
This is the law of conservation of momentum for a collision in 1-D motion. Note that you need to use the appropriate sign when applying this equation. For example, if you take rightward as the positive direction, then the velocity of an object moving to the right is positive and the velocity of an object moving to the left is negative.
Impulse
When two objects collide, they exert forces on one another for a brief period of time. The force on an object multiplied by the impact time is called the impulse.The impulse imparted to an object by a force $\vec F$ is
$Impulse=\vec F \Delta t$
By using the force-momentum relation, $\vec F=\dfrac{\Delta \vec p}{\Delta t}$, we can write,
$Impulse=\Delta \vec p$
That is, impulse is just the change in momentum. So you can use either of the above formulas to find the impulse.Impulse is a vector and its direction is the direction of the force.
Applying a larger force for a short time produces the same impulse (or change in momentum) as applying a smaller force for a long time.
Types of collisions
There are two types of collisions: elastic and inelastic. In all collisions, momentum is conserved. In an elastic collision, kinetic energy is also conserved.Elastic collision
In an elastic collision, both momentum and kinetic energy are conserved. Collisions between hard objects are generally elastic. Some examples of elastic collisions are collisions between billiard balls and collisions between atoms or molecules. During an elastic collision, no heat or other energy is produced, so there is no loss in kinetic energy.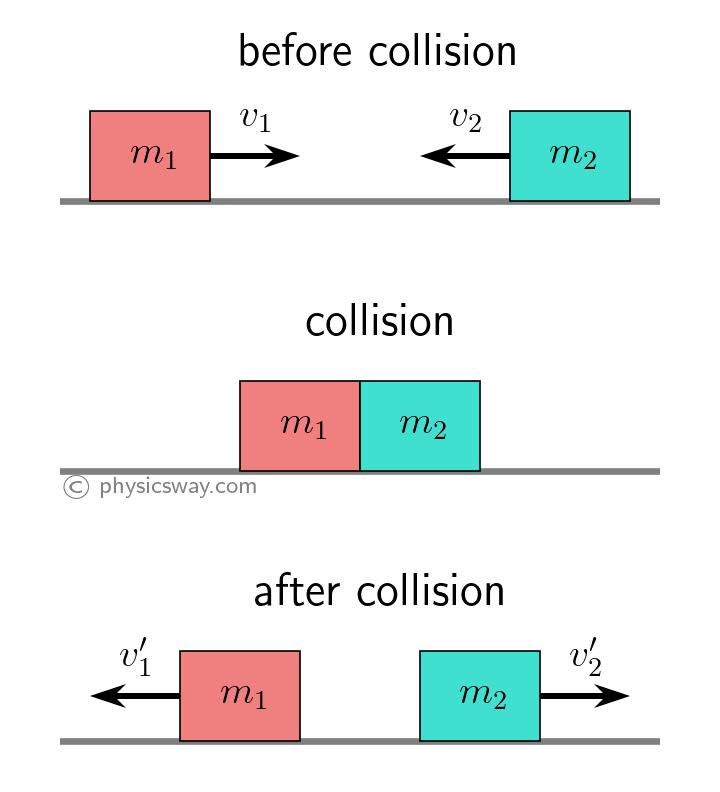
The figure above shows two objects in a 1-D elastic collision. The mass of object 1 is $m_1$ and that of object 2 is $m_2$. The velocities of the objects before and after the collision are shown in the figure.
For a 1-D elastic collision, we have two equations to work with: the law of conservation of momentum and the conservation of kinetic energy:
$m_1v_1+m_2v_2=m_1v_1'+m_2v_2'$.
and$\dfrac{1}{2}m_1v_1^2+\dfrac{1}{2}m_2v_2^2=\dfrac{1}{2}m_1v_1'^2+\dfrac{1}{2}m_2v_2'^2$
The left-hand side is the total kinetic energy of the objects before the collision, and the right-hand side is the total kinetic energy after the collision.
To solve problems involving an elastic collision, you need to use these two equations. But solving them together is time-consuming. Fortunately, we can derive a simpler equation from the two above, namely,
$v_1-v_2=-(v'_1-v'_2)$
You can find the derivation of this equation in the page: elastic collision equations.
We use this equation together with the first equation (the momentum conservation equation) to solve problems involving 1-D elastic collisions.
Inelastic collision
In an inelastic collision, only momentum is conserved; kinetic energy is not. The system's kinetic energy either decreases or increases in an inelastic collision. An inelastic collision can be either completely inelastic or partially inelastic. In a completely inelastic collision, the colliding objects stick together, whereas in a partially inelastic collision, the objects do not stick together but move separately after the collision.Two dimensional collision
In a two-dimensional (2-D) collision, the paths of the objects before and after the collision do not all lie on a single line.Let us consider the following 2-D collision involving a system of two objects: object 1 of mass $m_1$ and object 2 of mass $m_2$. Object 1 moves in the positive $x$ direction with speed $v_1$ toward object 2, which is at rest.
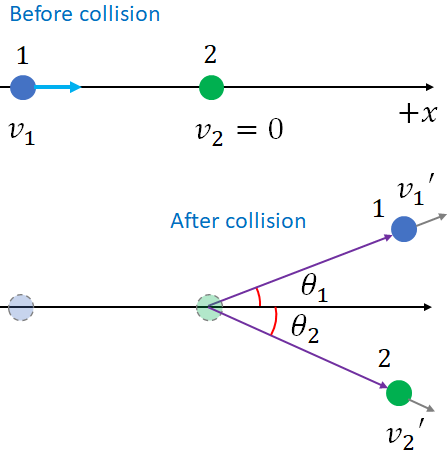
Object 1 then collides with object 2, and after the collision, object 1 moves at an angle $\theta_1$ above the $x$ axis with speed $v_1'$, and object 2 moves at an angle $\theta_2$ below the $x$ axis with speed $v_2'$.
We describe the collision using momentum vectors. Since the $x$ and $y$ components of a momentum are independent of each other, momentum is conserved along the $x$ axis and along the $y$ axis separately. So we will have two momentum conservation equations, one for the $x$ direction and the other for the $y$ direction.
i.e., $p_x=p_x'$ and $p_y=p_y'$
where $p_x$ and $p_y$ are, respectively, the $x$ and $y$ components of the total momentum of the system before the collision, and $p_x'$ and $p_y'$ are those after the collision.
First let us consider the momentum before the collision.
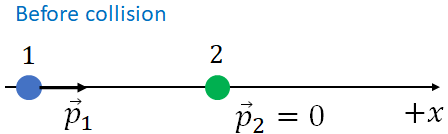
The momentum of object 1, $\vec p_1$ is on the $x$ axis as the object 1 moves along the $x$ axis. The magnitude of $\vec p_1$ is
$p_1=m_1v_1$
Since $\vec p_1$ is on the $+x$ axis, we have
$p_{1x}=m_1v_1$ and $p_{1y}=0$
Since object 2 is at rest, its momentum is $\vec p_2=0$. So we have
$p_{2x}=0$ and $p_{2y}=0$
Adding the $x$ components of the momenta of object 1 and 2, we get
$p_x=m_1v_1$
And, adding the $y$ components of the momenta of object 1 and 2, we get
$p_y=0$
Now, let us consider the momentum after the collision.
The momenta, $\vec p_1'$ and $\vec p_2'$ of the object 1 and the object 2 after the collision are shown in the figure below. The magnitudes of the momenta are
$p_1'=m_1v_1'$ and $p_2'=m_2v_2'$
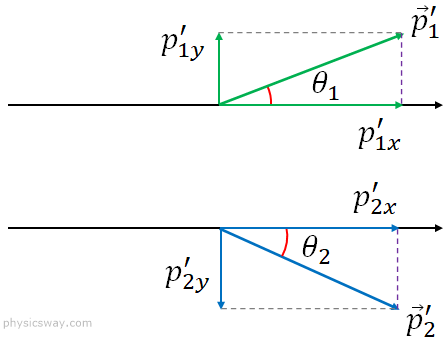
$p_{1x}'=m_1v_1'\cos\theta_1$ and $p_{1y}'=m_1v_1'\sin\theta_1$
And for the object 2,
$p_{2x}'=m_2v_2'\cos\theta_2$ and $p_{2y}'=-m_2v_2'\sin\theta_2$
Adding the $x$ components of the momenta of the objects together and the $y$ components together, we get
$p_x'=m_1v_1'\cos\theta_1+m_2v_2'\cos\theta_2$ and
$p_y'=m_1v_1'\sin\theta_1-m_2v_2'\sin\theta_2$
Applying the law of conservation of momentum along the $x$ axis ($p_x=p_x'$)and along the $y$ axis ($p_y=p_y'$), we get,
$m_1v_1=m_1v_1'\cos\theta_1+m_2v_2'\cos\theta_2$
and$0=m_1v_1'\sin\theta_1-m_2v_2'\sin\theta_2$
These are the two equations you will use to solve 2-D collision problems.
Center of mass
In the figure below, there is a rock. What is the position of the rock?
For a spherical object, we take its center as the position of the object. In 2-D, if the object has a regular shape such as a circle, square, or rectangle, we can find its center point by drawing lines of symmetry; the point where they intersect is the center point. This point is called the center of mass.
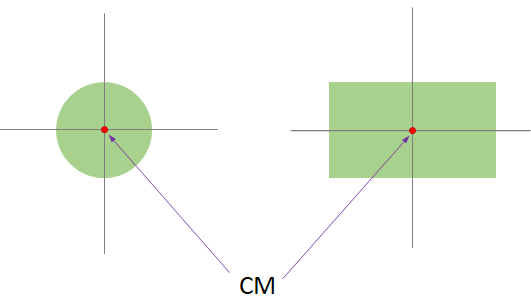
The center of mass is the average position of an object's or a system's mass. For a sphere, the center of mass is the center of the sphere.
How to find the center of mass?
In the following figure, you have a system of two spherical objects of mass $m_1$ and $m_2$ connected by a light rod of negligible mass. What is the center of mass of the system?

In three dimensions (3-D), a point is described by three coordinates: $(x, y, z)$. Since the center of mass is a point, we write the position of the center of mass as
$r_{cm}=(x_{cm}, y_{cm}, z_{cm})$
where $x_{cm}$, $y_{cm}$, and $z_{cm}$ are the $x$, $y$, and $z$ coordinates of the center of mass.
If the position of the center of object 1 is $(x_1, y_1, z_1)$ and that of object 2 is $(x_2, y_2, z_2)$, then
$x_{cm}=\dfrac{m_1x_1+m_2x_2}{m_1+m_2}$
$y_{cm}=\dfrac{m_1y_1+m_2y_2}{m_1+m_2}$
and$z_{cm}=\dfrac{m_1z_1+m_2z_2}{m_1+m_2}$
The above equations can be extended to more than two objects. For example, if there are 4 objects, there will be two more terms in the numerator and two more in the denominator of each equation.
Now, the question is: how do we find the center of mass of an irregularly shaped object, like the rock?
To find the center of mass of an irregular object such as a rock, assume the object is made up of a large number of tiny, regularly shaped pieces of equal mass. Each tiny piece has a different position, and the average of the positions of these pieces is the center of mass of the object.
Why is the center of mass important?
For a rigid body, the center of mass is an important quantity. When you consider the gravitational force between two spherical objects, the distance between them is measured center to center. But if the two objects are irregularly shaped, the distance you measure is the distance between their centers of mass.The center of mass is also called the center of gravity, although the definition of the center of gravity is different from that of the center of mass. In most cases, however, the center of gravity and the center of mass are the same. As you can see in the figure below, the center of mass is the balancing point.
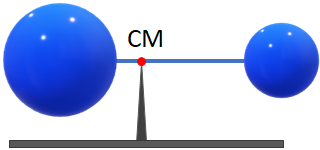
The center of mass lies closer to where more of the mass is concentrated. So the mass to the left of the center of mass and the mass to the right are not necessarily the same.